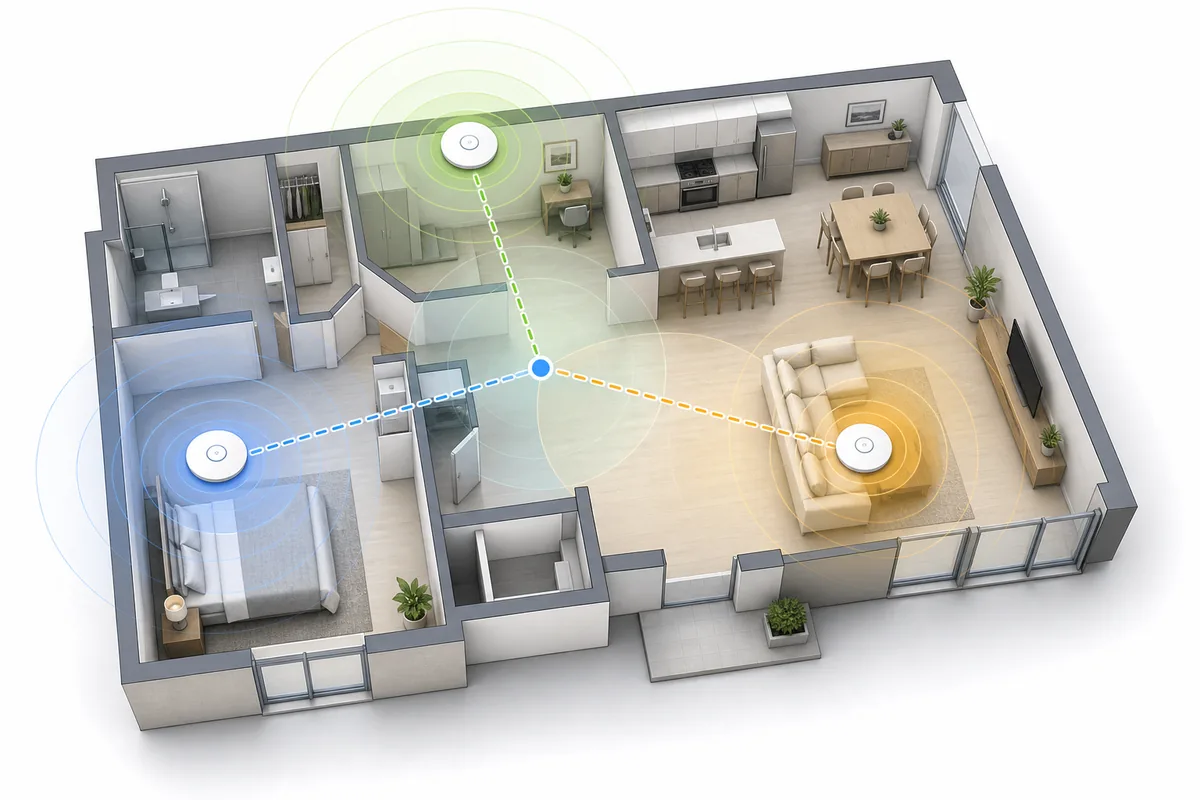
El posicionamiento interior WiFi es la parte de WiFi sensing centrada en ubicación. No pregunta solo si una sala está ocupada, sino dónde podría estar un teléfono, etiqueta, placa o señal dentro de un edificio. En los resultados de búsqueda se mezclan RSSI fingerprinting, triangulación WiFi, localización CSI, AoA, ToF y sistemas híbridos con BLE, UWB, sensores inerciales o interfaces sin cámara.
Para un sitio tipo RuView, la pregunta útil no es si WiFi puede localizar algo en interiores. Puede hacerlo bajo supuestos claros. Lo importante es qué precisión es realista, qué método encaja con el hardware disponible y cómo mostrar confianza sin convertir una demo de investigación en una promesa de rastreo.
Qué estima realmente el posicionamiento WiFi
El posicionamiento interior usa mediciones de radio para inferir una posición dentro de edificios donde GPS no funciona bien. La entrada puede ser intensidad de señal de varios puntos de acceso, un mapa de fingerprints, estimaciones de tiempo o ángulo, o Channel State Information de hardware compatible.
La salida debería tratarse como probabilística: una zona probable, una sala, un área de confianza o un conjunto de ubicaciones candidatas. No debe sugerir seguimiento centimétrico si el hardware y la validación no lo demuestran.
- Nivel zona: útil para salas, activos y automatización aproximada.
- Nivel metros: posible con fingerprinting cuidado o CSI, pero sensible a cambios del entorno.
- Seguimiento fino: suele requerir múltiples anclas, sincronización o fusión de sensores.
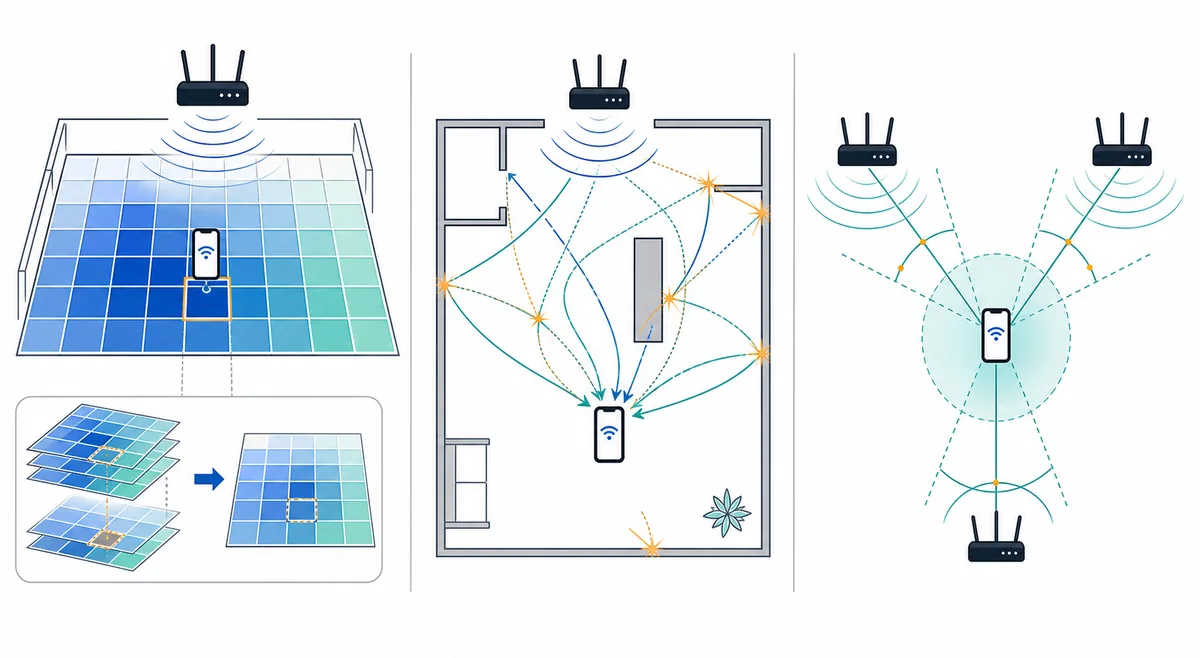
RSSI fingerprinting frente a localización CSI
RSSI fingerprinting es el punto de partida habitual porque muchos dispositivos exponen intensidad de señal. Se registran patrones en puntos conocidos y luego se compara una lectura real con ese mapa. Es práctico, pero el mapa deriva cuando cambian muebles, personas, puertas o puntos de acceso.
CSI conserva más detalle del canal WiFi: amplitud y fase por subportadora. Esa estructura puede ayudar en salas con multipath y en investigación, pero exige hardware compatible, limpieza de fase, calibración y etiquetas fiables.
| Método | Mejor uso | Límite principal |
|---|---|---|
| RSSI fingerprinting | Salas, pisos o zonas con lecturas WiFi comunes | Necesita encuesta de sitio y mantenimiento |
| Localización CSI | Investigación y señales más ricas por subportadora | Requiere hardware y preprocesamiento cuidadoso |
| AoA / ToF | Estimaciones con infraestructura de ángulo o tiempo | Necesita soporte de hardware y sincronización |
| Posicionamiento híbrido | Sistemas con WiFi, BLE, UWB, IMU o reglas de mapa | Más robusto, pero más difícil de explicar |
Dónde encajan ESP32 y RuView
Las placas ESP32 ayudan a aprender captura CSI y a construir experimentos pequeños, pero no son un sistema universal de posicionamiento. Para estimar ubicación suelen hacer falta puntos de referencia, varias mediciones, mapas etiquetados o múltiples enlaces.
RuView encaja mejor como capa de explicación: demo, confianza, límites y enlaces a la pila de señal. Las capas inferiores deben demostrar que distinguen ubicación real de cambios ambientales normales.
- Usa la guía de Channel State Information para entender las características CSI.
- Usa la guía ESP32 CSI cuando la duda sea captura de hardware.
- Usa esta página para ubicación, fingerprinting, precisión por zona y validación.
Flujo práctico de validación
Empieza con un plano, un objetivo de precisión y posiciones de hardware documentadas. Define si basta clasificar la sala, localizar activos a varios metros o seguir trayectorias más finas.
Valida fuera de la sesión de encuesta. Prueba otro día, otro dispositivo, una sala con gente, muebles movidos o un cambio de canal. Informa error mediano, percentil 90, confusiones de zona y estados desconocidos.
| Paso | Qué registrar | Por qué importa |
|---|---|---|
| Plano y anclas | AP, receptores, paredes y cuadrícula | La geometría da contexto al error |
| Encuesta base | RSSI o CSI en puntos conocidos | Crea el mapa de referencia |
| Condición cambiada | Nuevo día, muebles, gente o dispositivo | Mide deriva y falsa confianza |
| Reporte de error | Mediana, p90, confusión y desconocidos | Los usuarios necesitan incertidumbre |
Límites de intención y encaje SEO
El posicionamiento interior WiFi no es lo mismo que detección humana. La detección pregunta si hay presencia o movimiento; la localización pregunta dónde está probablemente un dispositivo, etiqueta o señal objetivo.
Separar esta intención evita canibalización: RuView GitHub sigue siendo navegación de repositorio, ESP32 CSI sigue siendo captura, y esta guía cubre métodos, precisión y validación de localización.
- Página nueva: wifi indoor positioning, wifi localization, wifi positioning system.
- Apoyo en páginas existentes: ruview github, esp32 csi, channel state information.
- FAQ o anchor: precisión, RSSI frente a CSI, si WiFi puede localizar personas.
Límites responsables de localización
La localización interior puede revelar patrones sensibles de movimiento aunque no use cámaras. Una implementación real debe explicar consentimiento, retención, procesamiento local, acceso al mapa y significado de la incertidumbre.
En salud, seguridad o vigilancia laboral, evita usar una demo WiFi como única fuente de verdad. Presenta estados de baja confianza y documenta fallos por multipath, multitudes, dispositivos distintos y cambios de AP.
- Declara precisión objetivo antes de mostrar un mapa.
- Separa ubicación de dispositivo, ocupación de zona y seguimiento humano.
- Prefiere procesamiento local y retención corta.
- Documenta deriva, multitudes y cambios de infraestructura.
Sources and technical references
FAQ sobre posicionamiento interior WiFi
¿Qué precisión tiene el posicionamiento interior WiFi?
Depende del método, hardware, encuesta y entorno. RSSI suele servir para zonas o salas; CSI o infraestructura especializada puede mejorar resultados en condiciones controladas.
¿WiFi localization es igual que WiFi human detection?
No. La localización estima dónde está un dispositivo, etiqueta o señal objetivo; la detección humana estima presencia o movimiento.
¿ESP32 sirve para posicionamiento WiFi?
Puede servir para aprender CSI y hacer pruebas pequeñas, pero la localización fiable requiere referencias, baselines, etiquetas y validación.
¿Qué es WiFi fingerprinting?
Es registrar patrones de señal en lugares conocidos y comparar una lectura en vivo contra ese mapa.
¿Dónde encaja RuView?
RuView funciona como capa de demo y explicación; la tubería de posicionamiento necesita mediciones validadas y límites visibles.