WiFi indoor positioning is the location-focused branch of WiFi sensing. Instead of asking only whether a room is occupied, it asks where a phone, tag, board, or person-related signal is likely to be inside a building. Search results often mix several methods together: RSSI fingerprinting, WiFi triangulation, CSI localization, AoA, ToF, and hybrid systems that combine WiFi with BLE, UWB, inertial sensors, or camera-free sensing interfaces.
For a RuView-style site, the useful question is not whether WiFi can ever locate something indoors. It can, under the right assumptions. The harder question is what accuracy is realistic, which method fits the available hardware, and how to show confidence without turning a research demo into a tracking guarantee. This guide separates the methods, gives a validation checklist, and explains where indoor positioning fits beside existing RuView CSI, ESP32, dataset, and human-detection resources.
What WiFi indoor positioning actually estimates
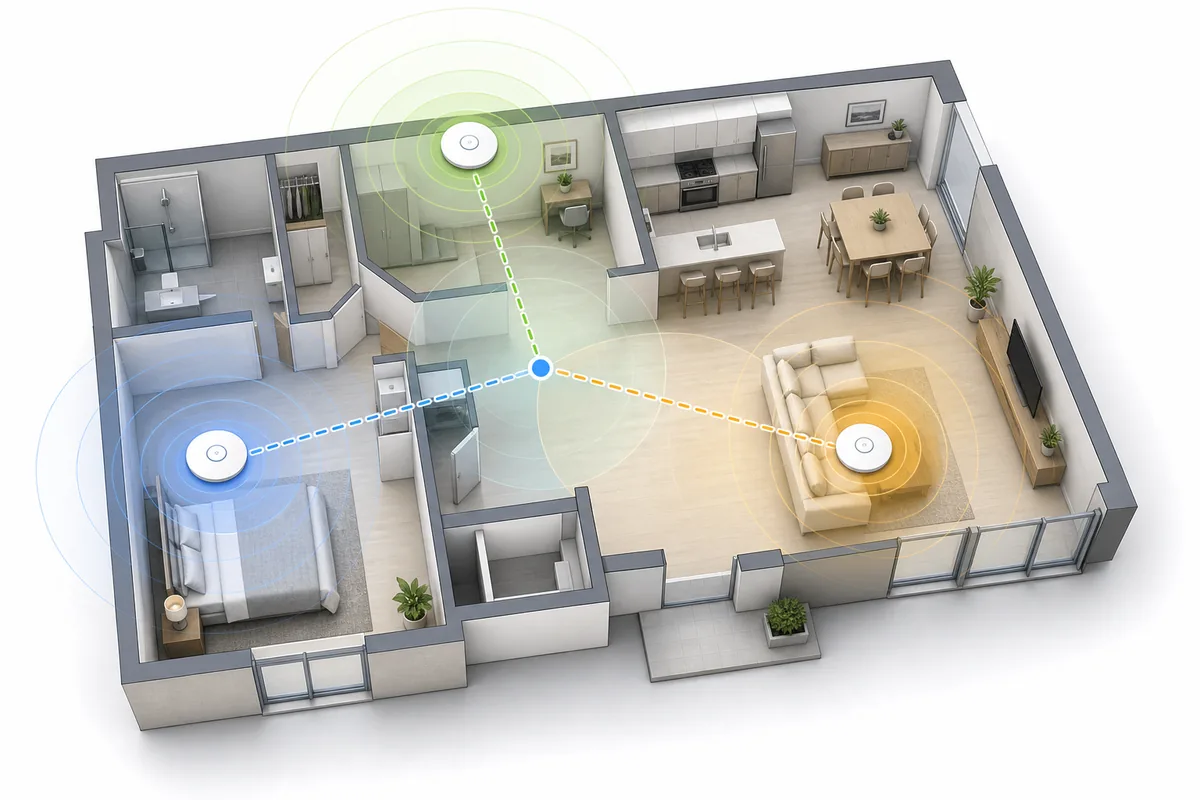
Indoor positioning uses radio measurements to infer a position inside a building where GPS is weak or unavailable. The input may be signal strength from nearby access points, a fingerprint map built from survey points, timing or angle estimates from specialized hardware, or Channel State Information from compatible WiFi devices. The output is usually a location estimate, a zone, a confidence area, or a ranked set of likely rooms.
A responsible system treats that output as probabilistic. A WiFi positioning system may say that a device is probably near a conference room, near a hallway access point, or inside a three-meter confidence zone. It should not silently imply centimeter-grade tracking unless the hardware and validation prove it.
- Zone-level positioning: useful for room occupancy, asset areas, and coarse automation.
- Meter-level positioning: possible in controlled fingerprinting or richer CSI setups, but sensitive to layout changes.
- Fine-grained tracking: usually needs stronger hardware, multiple anchors, synchronization, or sensor fusion.
RSSI fingerprinting versus CSI localization
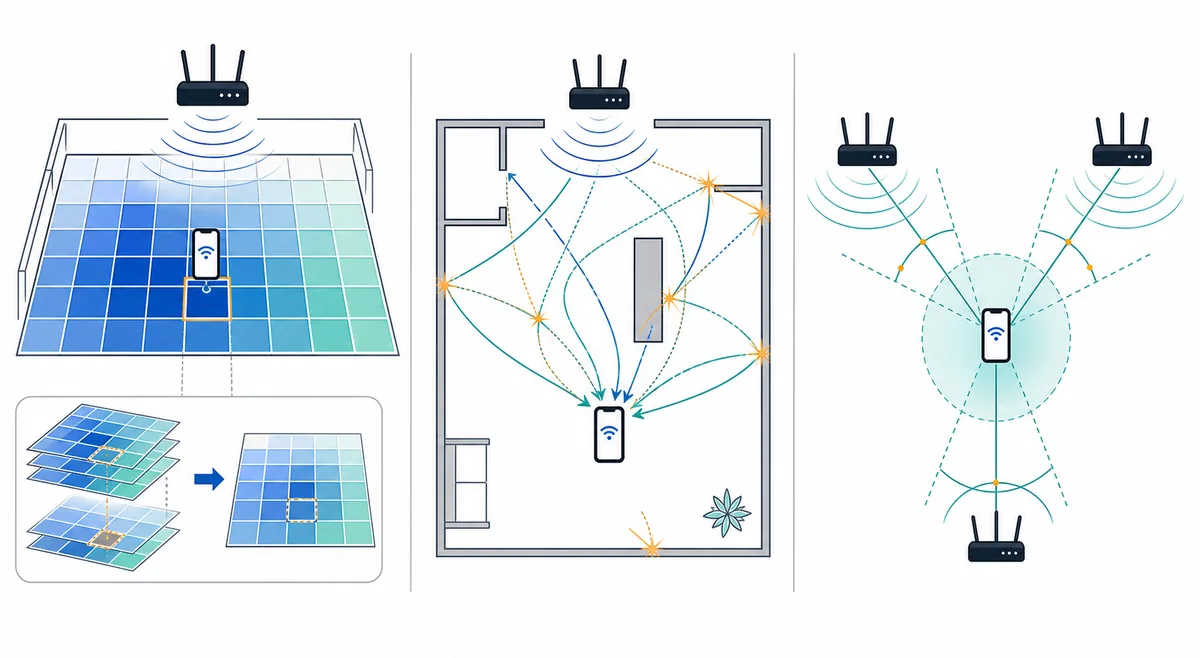
RSSI fingerprinting is the common starting point because many WiFi clients and access points expose signal strength. A team surveys known points in a building, records signal-strength patterns from visible access points, and later matches a live reading against that fingerprint database. It is practical, but maintenance is the hard part: moved access points, new furniture, crowds, doors, and device differences can shift the map.
CSI localization keeps more detail about the WiFi channel. Instead of one strength value, CSI can expose subcarrier-level amplitude and phase behavior. That extra structure can help with multipath-rich rooms, motion-aware localization, or research-grade sensing. It also raises the bar for hardware support, preprocessing, calibration, and labels.
| Method | Best fit | Main limitation |
|---|---|---|
| RSSI fingerprinting | Coarse room, floor, or zone estimates with ordinary WiFi signal readings | Needs site survey and can drift when the environment changes |
| CSI localization | Research and richer sensing where subcarrier behavior matters | Requires compatible hardware and careful phase or feature cleanup |
| AoA / ToF | Infrastructure-assisted angle or timing estimates | Needs hardware support, synchronization, and controlled deployment |
| Hybrid positioning | Production systems that combine WiFi with BLE, UWB, IMU, maps, or rules | More robust but harder to debug and explain |
Where ESP32 and RuView fit
ESP32 boards can help teams learn WiFi CSI capture and build small indoor experiments, especially when the goal is to understand how multipath changes in one room. They are not a universal indoor positioning system by themselves. A single sender and receiver may show that a person or object changed the channel, while a reliable location estimate usually needs multiple reference points, repeated baselines, or a labeled map.
RuView should be treated as the explanation layer. It can present the demo, confidence, limitations, and links to the sensing stack. The lower layers still need to prove that the signal pipeline can distinguish location from ordinary environmental change. For this reason, WiFi indoor positioning belongs beside the CSI and dataset pages, not inside the existing human-detection page.
- Use the Channel State Information guide when the blocker is understanding CSI features.
- Use the ESP32 CSI guide when the blocker is hardware capture.
- Use this page when the blocker is location, fingerprinting, zone accuracy, or localization validation.
A practical validation workflow
A WiFi indoor positioning test should begin with a floor plan, a clear accuracy target, and a record of hardware placement. Define whether the system only needs room-level classification, three-to-five-meter asset location, or tighter path tracking. Then collect data across reference points, device orientations, empty and occupied conditions, and at least one changed day.
Do not validate only against the survey session. A fingerprinting model can look strong when tested on nearby points recorded minutes later. It becomes more honest when tested after a moved chair, a different phone, a crowded room, a router channel change, or a new day. Report median error, worst-case error, zone confusion, and unknown states instead of one average number.
| Validation step | What to record | Why it matters |
|---|---|---|
| Floor plan and anchors | Access point positions, receiver positions, wall materials, and survey grid | Location results cannot be interpreted without geometry |
| Baseline survey | RSSI or CSI traces at known points with device orientation and timestamps | The model needs a repeatable reference map |
| Changed condition | New day, moved furniture, crowd, open door, or different device | This exposes drift and false confidence |
| Error report | Median error, 90th percentile error, zone mistakes, and unknown states | Users need uncertainty, not only success screenshots |
Search intent boundaries and page fit
WiFi indoor positioning has a different intent from WiFi human detection. Human detection asks whether a person is present or moving. Indoor positioning asks where a device, tag, signal source, or inferred target is likely to be. It also differs from the open source GitHub page, which helps choose repositories, and from the dataset page, which focuses on labels and benchmarks.
That separation matters for SEO and for users. A searcher looking for WiFi localization expects method comparison, accuracy tradeoffs, fingerprinting workflow, and validation limits. A searcher looking for RuView GitHub expects repository navigation. A searcher looking for ESP32 CSI expects capture setup. Keeping those answers on separate pages avoids cannibalization and makes internal links more useful.
- New page fit: wifi indoor positioning, wifi localization, wifi positioning system.
- Existing page support section: ruview github, esp32 csi, channel state information.
- FAQ or anchor fit: can WiFi locate people indoors, RSSI versus CSI, how accurate is WiFi positioning.
Responsible limits for indoor localization
Indoor localization can reveal sensitive movement and occupancy patterns even when it avoids cameras. Any real deployment should explain consent, data retention, local processing, map access, and the meaning of uncertainty. The system should also provide a fallback when confidence is low instead of forcing every signal into a precise point on a map.
For health, security, emergency response, or employee monitoring, be especially conservative. WiFi positioning can support research and automation, but a general demo should not be used as the only source of truth for life-safety, clinical, or enforcement decisions.
- State the target accuracy and confidence model before showing a live map.
- Separate device location, zone occupancy, and human tracking claims.
- Prefer local processing and short retention for occupancy-related data.
- Document failure modes such as multipath drift, crowds, device diversity, and access-point changes.
Sources and technical references
WiFi Indoor Positioning FAQ
How accurate is WiFi indoor positioning?
Accuracy depends on method, hardware, survey quality, layout, and validation. RSSI fingerprinting is often best for room or zone estimates, while richer CSI or infrastructure-assisted methods may improve results in controlled setups.
Is WiFi localization the same as WiFi human detection?
No. WiFi localization estimates where a device, tag, or signal-related target is likely to be. WiFi human detection estimates whether a person or movement is present. They can share CSI concepts but answer different questions.
Can ESP32 be used for WiFi indoor positioning?
ESP32 can be useful for learning CSI capture and small experiments, but reliable positioning usually needs multiple reference points, careful baselines, labels, and validation across changed conditions.
What is WiFi fingerprinting?
WiFi fingerprinting records signal patterns at known indoor locations, then compares a live signal pattern against that map. It is practical but can drift when access points, furniture, crowds, or client devices change.
Where does RuView fit in a positioning workflow?
RuView is best treated as a browser-facing explanation and demo layer. The positioning pipeline still needs validated WiFi measurements, a clear accuracy target, and visible uncertainty before results are trusted.